Steering and Braking.
Road usage for a tracked vehicle immediately poses a problem that most wheeled drivers aren't even aware of: the fact that roads have chamber. This feature dates back to Roman times and is principally to shed water to the edges of the road. When driving, a wheeled vehicle driver holds a slight bias on the wheel (in modern vehicles) and with power steering it is almost not noticeable.
However, with track steer vehicles it is a problem. If the vehicle is brake steer, such as most tanks and APCs, the driver has to be constantly tweaking the steering brake on the high side as the vehicle naturally drifts to the outside (lower side) of the road. This robs power, increases fuel consumption and increases differential and steering brake wear.
It was an evoluntionary necessity that tracked fighting vehicles needed a solution to this issue due to the distances they needed to cover under their own power - not relevant to the tracked earthmoving world where bulldozers and excavators don't go that fast or move those distances.
The Bren Gun Carrier used a track warping design which sounded good in theory. But in practise meant that there was a amount of free play whilst on level ground. (If you have ever driven a vehicle with a recirculating ball steering box you will know what I mean.) Having driven a BGC on a road that had a cross slope revealed to me the inherent downfall of the design: the fact that (in pre-power assistance days) the driver had to physically counter the weight of the vehicle that was transmitted through the track warp steering system.
The Kettenkrad took a totally different approach to the issue of steering. The designers preferring to use a scaled down version of the German half track (strictly speaking "3/4 track") design. Note that this is vastly different to the US half track engineering: which is a simple conventional truck power train with tracks fitted where the back wheels would normally be.
Instead, the German system uses a licenced copy of the Cletrac tractor drive unit for tight turns and a wheeled front end to control small steering corrections such as those needed to counter road chamber.
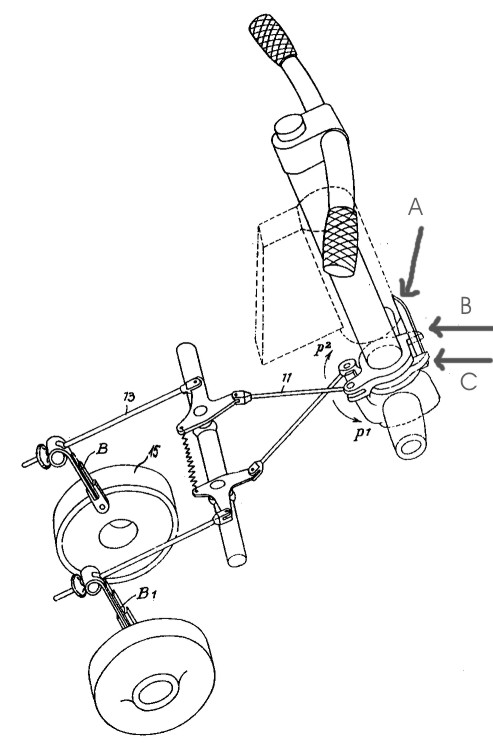
How was this achieved with the Kettenkrad? Quite simply in fact. There are control rods that are connected to the motor bike steering BUT not directly. These are activated by 2 finger plates that have a gap between them. A striker on the steering column moves the appropriate finger after approximately 5° of handle bar movement from centre. Further movement pulls the rods to the steering function of the Cletrac drive.
Download the big pics by clicking on the small pics...
The letter "A" is pointing to the striker bar on the steering.
The letters "B" and "C" are pointing to the steering brake fingers.
The Cletrac drive is quite intriguing to watch in action, when the vehicle is moving straight ahead the steering brake drums are actually turning in the opposite direction to what you would expect. They appear to be going backwards. This is remedied by the final drives, which are nothing much more than change of direction gearboxes - with only a small gear reduction ratio. This is markedly different to final drives seen in AFVs, which have significant gear reduction ratios in their final drives.
In the above diagram you can readily see that the actuator fingers are attached by cross over rods to the steering brakes. So a when turning say "right" the right hand side steering brake is pulled on. This then causes the left hand side to receive more drive than the right hand side due to the differential action "seeing" less friction on the left hand side. There is still a loss of power, but no where near as much as with a standard differential using brake steer.
Download the big pics by clicking on the small pics...
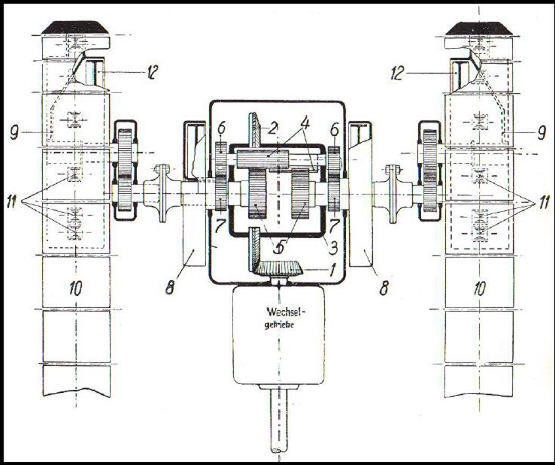
The number "8" is pointing to the steering brakes.
The number "12" is pointing to the wheel (sprocket) brakes.
Careful study of the above diagram will reveal that the 2 linear cog extensions (4) of the planetaries (6) mesh in over lap. So there is a linkage from one side to the other. The amount of power and thus revolutions delivered to each side is controlled by the amount of braking imparted by the steering brake drum which is bolted to cog number (7). Cog (7) runs on but is not connected to cog number (5), where as in a conventional diff that is brake steered (such as a Bren Gun Carrier) cogs (7) and (6) would not be present and (4) would be a normal planetary and (5) a sun gear.
So, steering corrections are made with normal movements of the handle bars and larger movements are used to turn the vehicle using brake steer. If you have been following this explanation you will probably be thinking "the front wheel must at some point be dragging due to the brake steer" - correct. It is simply a case of economics. Tracked AFVs have a surprisingly low time between rebuild, especially their gearboxes, diffs and motors, this is for multiple reasons, such as vehicle weight but is also due to the high usage of the driveline components due to steering corrections. Purely and simply, motor bike tyres are cheaper than gearboxes, diffs and motors.
This then brings us to the question of why have both steering brakes and drive brakes (sprocket brakes). It was probably a mixture of reasons:
1) To do the job, the drive brakes have to be fairly big, as evidenced by the size of the sprockets.
2) Trying to fit those large brakes inside the hull would have meant even less foot room than there already is and even poorer ergonomics (not that that concept really existed back in WW2).
3) The mechanics of applying sufficient force to operate the brakes if they were inside the hull.
4) The stresses applied through the driveline parts would have required those parts to be more robust and thus larger.
The brakes themselves are rod operated, which at first appearance makes you wonder how they could do the job. They are somewhat conventional vehicle brakes in that they have a leading and trailing shoe with a balancing connector to provide the usual servo effect where the leading shoe drags itself into more forceful application. In doing so, it applies extra force on the trailing shoe. The innovative part of the design is a wedge like device that forces apart the the 2 shoes and applies the force transmitted from the brake pedal. There are roller wheels on each shoe that run on the wedge. The overall effect is a 5 times multiplication of the braking force which would otherwise apply.
Whether or not the original intention was to avoid the use of hydraulic brakes in a vehicle that was open to the weather, or if the complexity and cost of a hydraulic system was being avoided is unknown. Being that NSU was a motor bike manufacturer it might not even have been a consideration for them as bike brakes were rod or cable operated in those days.
So why one wheel and not 2 as with all other semi-tracked vehicles? Mostly it is because one wheel did the job, but essentially it comes down to the fact that the manufacturer was a motor bike company - NSU (Neckarsulm Werke). This also explains the peculiar gearbox, more about that later.
BACK TO THE KETTENKRAD INDEX PAGE.
BACK TO INDEX